Overview
Our research has been implemented in high-quality software libraries that are regularly used in both academia and industry. Please see our lab’s Github page for a complete listing of our available code.
Highlights
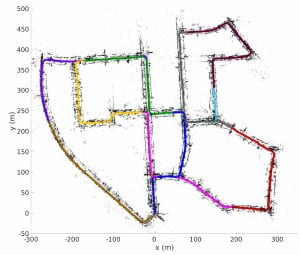
SE-Sync
The first practical algorithm that is provably capable of recovering correct (globally optimal) solutions of the fundamental problem of pose-graph SLAM under realistic operating conditions. This is the prototype for the class of convex-relaxation-based certifiably correct estimation methods for robust machine perception.
DC2-PGO
This algorithm implements a decentralized version of SE-Sync’s convex relaxation strategy, enabling a team of robots to recover a certifiably globally optimal solution to collaborative multi-agent SLAM tasks. This method is used as the distributed pose-graph optimization backend in the Kimera multi-agent mapping library.
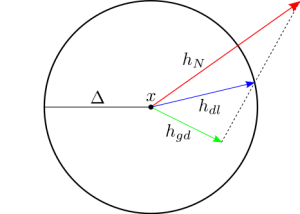
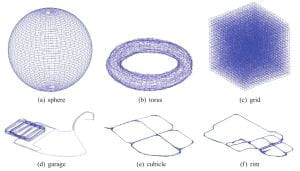
RISE
This algorithm implements an incremental version of the Powell’s Dog-Leg optimization method for solving online nonlinear least-squares estimation problems. It is one of the core incremental optimization methods used in the Georgia Tech Smoothing and Mapping (GTSAM) library, where it appears as the DogLegOptimizer.
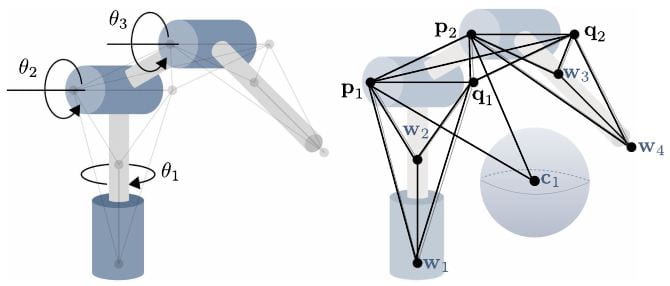
CIDGIK
This algorithm formulates inverse kinematics problems for robotic manipulators as distance geometry problems, and then applies an iterative convex relaxation strategy to solve them. This approach enables faster, more accurate, and more reliable solution of inverse kinematics problems than traditional (local optimization-based) methods, especially for cases involving highly redundant manipulators or complex obstacle geometries. This is one of the core methods implemented in GraphIK library.