Current projects

Certifiably correct machine perception
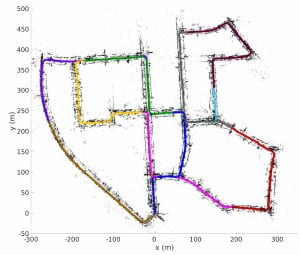
Our group has pioneered the first practical algorithms that are provably capable of recovering correct (certifiably globally optimal) solutions of many fundamental machine perception problems in real-world operation.
Decentralized optimization and multi-agent information fusion
Our team is developing novel decentralized optimization methods that are specifically adapted to the requirements of multi-agent robotic systems.

Tractable approximate Bayesian inference for introspective autonomy
We are developing probabilistic inference methods for robotic learning and perception tasks that provide dramatically improved models of posterior uncertainty, enabling safe, risk-aware autonomy in complex and uncertain environments.